
院士研究“系鞋带”解决医学大难题,还发了顶刊!
在咱们的日常生活中,系鞋带那可是再平常不过的事儿了。每天出门前,手指灵活地一绕一拉,鞋带就乖乖系好,稳稳地固定住鞋子,让我们能大步流星地开启新一天。 在数千年的使用历史里,人们只把它当作实用工具,却从未深入探究其背后严谨的力学规律。 可你能想象吗?这看似简单的系鞋带动作,竟然被一群聪明的科学家“盯上”,还摇身一变,成了解决医学大难题的“秘密武器”,相关研究成果甚至登上了国际顶级学术期刊:2025年11月26日,这项研究成果作为封面文章发表在《Nature》(《自然》)上(图1)! 这究竟是怎么一回事呢?别急,咱们这就一起揭开这背后神秘的力学面纱。 一、医生的手术打结难题 咱们先把目光聚焦到外科手术室。在手术台上,医生们就像技艺精湛的工匠,手中的手术刀和缝合线就是他们常用的“秘密武器”。缝合伤口,是手术中至关重要的一环,而打结则是缝合过程中的关键步骤。 可别小瞧这个打结,它就像一场微妙的“力量博弈”,力度大了小了都不行。 如果打结力度太小,那么伤口就像系了个松松垮垮的蝴蝶结,稍微一活动就可能裂开。这不仅影响伤口愈合,还可能引发感染,让患者遭更多的罪。 反之,要是打结力度太大,可能问题就大了。这就好比给伤口戴了个“紧箍咒”,会限制局部的血液流动,让伤口周围的组织得不到充足的养分和氧气供应,就会变得肿胀、苍白,愈合速度也会大大减慢。 传统上,医生们只能凭借自己丰富的经验和敏锐的手感来判断打结的力度。虽然经验丰富的医生能凭借多年的积累做到相对精准,但对于年轻医生来说,这无疑是一项巨大的挑战。他们就像刚学骑自行车的新手,总是掌握不好平衡,要么用力过猛,要么用力不足。而且,就算是有经验的医生,在长时间高强度的手术中,也难免会因为疲劳而导致手感出现偏差。 随着科技的发展,机器人辅助手术逐渐走进了人们的视野。这些机器人就像医生们的得力助手,能够执行一些精细的操作。然而,在微创手术等空间受限的操作中,机器人也遇到了难题。它们需要复杂的传感系统来感知和控制打结的力度,可这些传感系统都是金贵精密的器件,不仅成本高昂,而且在狭小的手术空间里,很容易受到各种因素的干扰,无法稳定工作。这可把医生们愁坏啦! 难道就没有一种更好的办法来解决这个缝合线打结力度控制的难题吗? 二、来自系鞋带的力学灵感 就在大家一筹莫展的时候,浙江大学医学院附属邵逸夫医院蔡秀军院士团队与浙江大学航空航天学院交叉力学中心杨卫院士、李铁风教授、杨栩旭研究员团队的一次偶然讨论,就像一道闪电划破了黑暗的夜空,带来了希望的曙光。团队里的杨栩旭研究员,在一次系鞋带的时候,突然灵光一闪:这系鞋带时打的活结,不就是解决手术打结力度控制问题的关键嘛! 咱们来仔细瞧瞧这系鞋带时打的活结。当你把鞋带绕成活结,两头轻轻一拉,活结就会慢慢收紧;而当你想要解开它的时候,只要稍微用力一扯双线抽头一端,活结就会迅速松开(图2),同时释放出一个预设的精准峰值力。 这个峰值力就像活结的“秘密信号”,它的大小和活结的很多参数有关,比如结环的数量、直径,还有鞋带的摩擦系数、弹性模量等等。 杨栩旭研究员意识到,这个活结的力学特性简直就是一个天然的“力度控制器”。如果能把这个原理应用到手术缝合中,不就可以解决打结力度控制的难题了吗?这个想法就像一颗种子,在团队成员们的心中生根发芽,他们决定深入研究这个看似天马行空的想法。 三、力学建模和计算揭开活结的“神秘面纱” 为了把系鞋带的灵感变成真正能解决医学问题的技术,研究团队开始了艰苦的探索。他们首先运用力学建模的方法,就像给活结画一幅精确的“设计图纸”,把活结在打开过程中各个部分的受力情况、运动轨迹都详细地描绘出来。 在力学建模的过程中,团队成员们就像一群侦探,不放过任何一个细节。他们发现,活结打开力与缝线编活结时拉紧结点的力、结环数量、直径、摩擦系数、弹性模量等参数之间存在着复杂而又微妙的关系。这就像一场精心编排的剧本,每一个参数都是参演者,它们相互配合,共同演绎出活结独特的力学特性。 比如说,结环数量就像剧本中的节奏,数量越多,活结打开时释放的力就可能越大;而摩擦系数则像演员之间的默契程度,摩擦系数越大,活结在收紧和打开过程中就越“费劲”,释放的力也会有所不同。通过不断地调整这些参数,就像调整剧本的节奏和动作,团队成员们可以精确地控制活结打开时释放的峰值力。 除了力学建模,团队还运用了有限元仿真这一强大的工具。有限元仿真就像一个虚拟的实验室,团队成员们可以在计算机上模拟活结在不同条件下的受力情况,观察它的变形和运动。这就像在实验室里做实验一样,只不过不需要实际的材料和设备,大大节省了时间和成本。通过有限元仿真,团队成员们可以更直观地了解活结的力学行为,验证力学建模的结果,为后续的研究提供有力的支持(图3)。 四、科研催生“活结智能缝线”创新产品 经过无数个日夜的精心推理和反复试错,不懈努力的研究团队终于取得了重大突破。他们基于活结的力学传导机制,开发出了一种名为“Sliputure”(活结智能缝线)的创新产品。这可不是普通的缝线,它就像一个“听话”的小机关,能在手术中发挥巨大的作用。 “Sliputure”缝线在传统外科结旁增加了一个活结结构(图4)。 这个活结结构就像一个隐藏的“力度调节器”,平时静静地待在那里,不声不响。当外科医生照常打好外科结后,只需要轻轻牵拉活结,直到它解开,就可以将精准的牵拉力传递至外科结,使外科结达到理想的力度。这就像给外科结安装了一个“智能遥控器”,医生可以通过控制活结的解开来精确调节外科结的力度,再也不用担心力度过大或过小的问题了。 咱用生活中的例子打比方,就更好理解了。我们常说“木桶短板效应(又称木桶定律)”,是指一只水桶能盛多少水,并不取决于桶壁上最高的那块木块,而恰恰取决于桶壁上最短的那块木板。活结就像木桶的短板,缝合线能受多大的力,是由活结决定的(图5)。 为了验证“Sliputure”缝线的实际效果,研究团队进行了一系列严格的实验。在大鼠结肠损伤修复模型中,他们将智能缝线组和传统缝线组进行了对比。实验结果让人惊喜不已:智能缝线组的大鼠伤口愈合速度明显比传统缝线组快,提前2天就达到了健康愈合水平,而且血供恢复得更好。事实证明了“Sliputure”缝线不仅能精准控制缝线松紧力度,而且临床疗效更好。 ——不看广告看疗效;泰山不是堆的,牛皮不是吹的! 进一步地,研究团队把新的缝线用到“达芬奇机器人”上。“达芬奇机器人”是一种用于微创手术的先进医疗设备,其设计的理念是通过使用微创的方法,实施复杂的外科手术,主要用于泌尿外科、妇科、胸外科等领域的复杂手术操作。在达芬奇机器人手术中,研究团队开发了基于视觉的活结检测系统。这个系统就像给机器人装上了一双“慧眼”,能够自动识别活结的位置和状态,并实现自动力控(图6)。 通过实验对比发现,使用“Sliputure”缝线和基于视觉的活结检测系统的机器人手术,缝合压力的一致性显著优于传统方法。这意味着机器人在手术中能够更加精准地控制打结力度,就像一个经验丰富的老司机,能够稳稳地驾驶汽车,让手术更加安全、可靠。 五、力学基础小窍门解决临床医学大难题 “Sliputure”缝线的出现,就像一颗投入平静湖面的石子,在医学领域激起了层层涟漪。它不仅解决了外科手术中的打结力度控制难题,还为机器人手术装上了“神经末梢”,让机器人能够感知并精准控制力度。更重要的是,这种基于活结的力学传导机制完全不依赖电子设备,成本低廉且易于消毒处理,就像一个朴实无华却又实力超群的“平民英雄”,具有巨大的临床应用潜力。 在微创手术中,手术空间非常狭小,传统的传感系统很难发挥作用。而“Sliputure”缝线凭借其简单的结构和精准的力学控制,能够轻松应对微创手术的挑战,为患者带来更小的创伤和更快的康复。在偏远地区或战地医疗中,医疗资源相对匮乏,复杂的电子设备可能无法正常使用。而“Sliputure”缝线不需要额外的电子设备支持,只需要医生掌握简单的操作方法,就可以为患者进行有效的手术缝合,大大提高了医疗救援的效率和成功率。 在手术培训教学中,“Sliputure”缝线也能发挥重要作用。年轻医生在学习手术缝合时,往往很难掌握打结的力度。而使用“Sliputure”缝线,他们可以通过观察活结的解开情况,直观地感受不同力度对缝合效果的影响,从而更快地提高自己的操作技能。此外,在安全人机交互领域,“Sliputure”缝线的力学传导机制也可以为机器人设计提供新的思路,通过精妙的结构设计替代部分复杂的电子传感与控制,降低高端机器人的制造成本与门槛,让机器人能够更广泛地应用于各个领域。 六、小结 从系鞋带到解决医学难题,“Sliputure”缝线的故事就像一部精彩的科幻电影,让我们看到了科学的力量和无限可能。它告诉我们,科学并不总是高高在上、遥不可及的,它其实就隐藏在我们生活的点点滴滴中。一个看似简单的日常动作,背后可能蕴含着深刻的科学原理;一个不经意的灵感闪现,可能就会引发一场科技的革命。 在日常生活中,我们也可以像研究团队的成员们一样,保持一颗好奇心,用心去观察身边的事物。也许,你会发现,一片飘落的树叶、一滴溅起的水花、一个旋转的陀螺,都隐藏着科学的奥秘。当我们把这些生活中的科学宝藏挖掘出来,用科学的思维和方法去研究和探索,就有可能创造出意想不到的成果,为人类的生活带来更多的便利和惊喜。 系鞋带“跨界”医学的故事,就像一盏明灯,照亮了我们探索科学的道路。跳出传统科研思维,从这一最朴素的日常行为切入,系统解析活结的力学传导与阈值触发机制,把生活里的小智慧,转化为解决医学大问题的核心技术,相关成果以封面论文发表于国际顶级期刊《Nature》,让全世界看到日常现象中蕴藏的科学力量。它让我们相信,只要我们敢于想象、勇于创新,就没有什么是不可能的。让我们一起期待更多的科学奇迹在生活的角落里诞生,为我们的未来增添更多的色彩! 图1 《Nature》封面文章
图1 《Nature》封面文章 图2 系鞋带的活结
图2 系鞋带的活结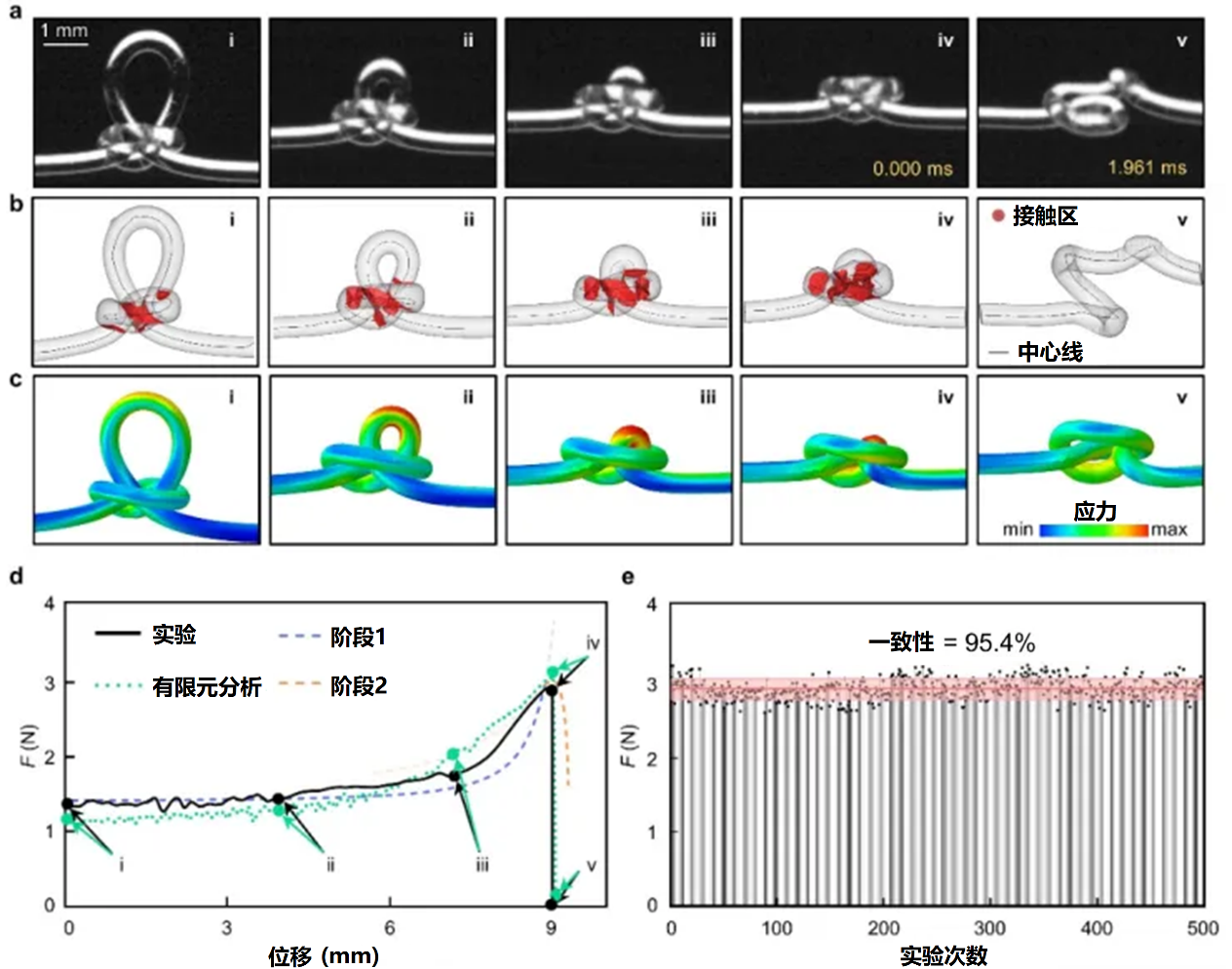 图3 有限元分析活结的力学行为
图3 有限元分析活结的力学行为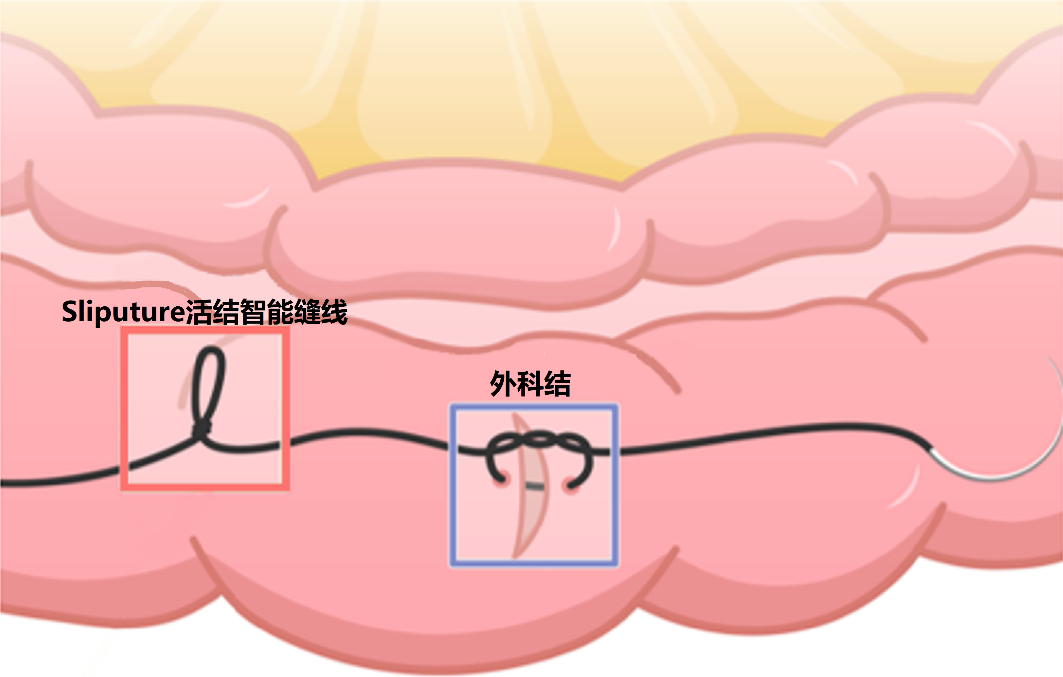 图4 “Sliputure”缝线在传统外科结旁增加了一个活结结构
图4 “Sliputure”缝线在传统外科结旁增加了一个活结结构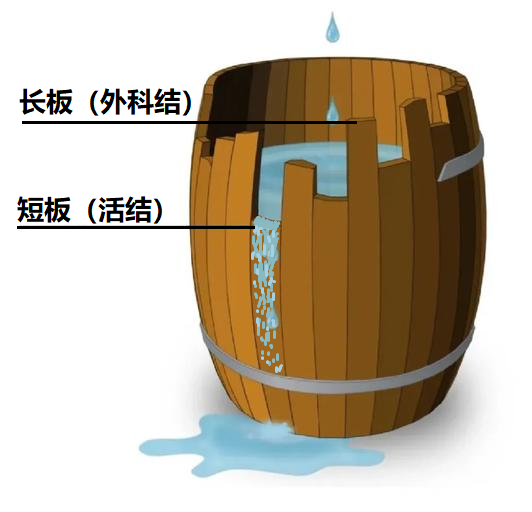 图5 活结就像木桶短板效应中的短板
图5 活结就像木桶短板效应中的短板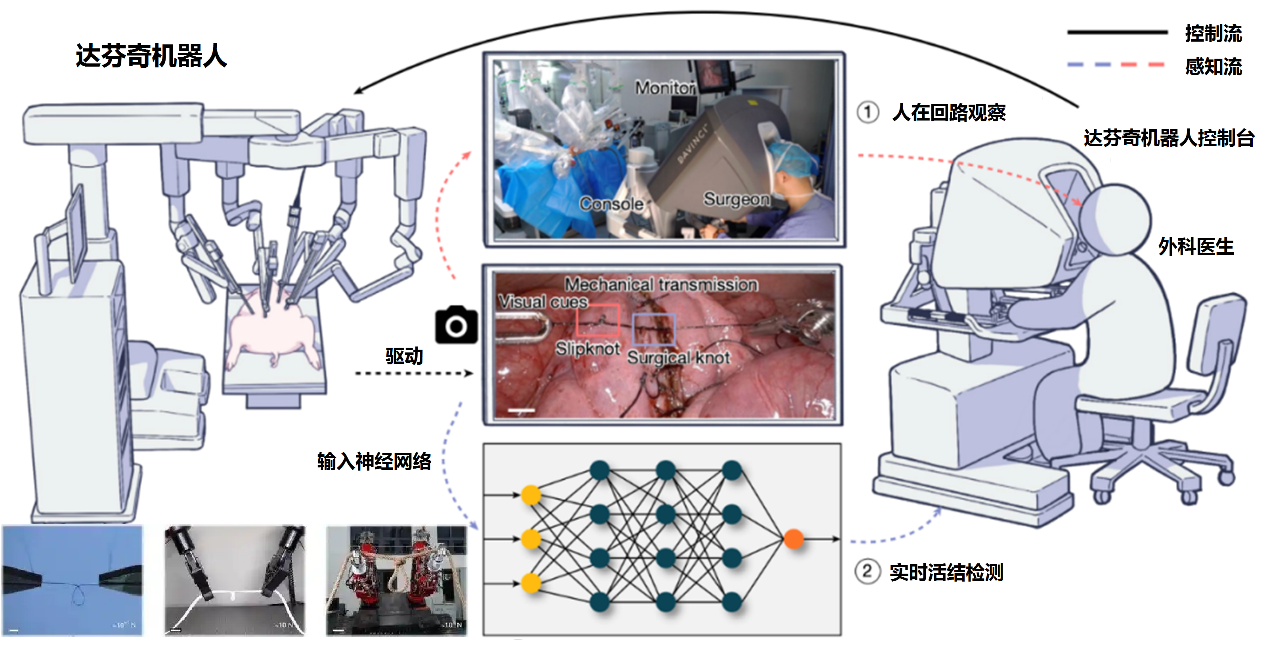 图6 达芬奇机器人中基于视觉的活结检测系统
图6 达芬奇机器人中基于视觉的活结检测系统



发表评论 取消回复